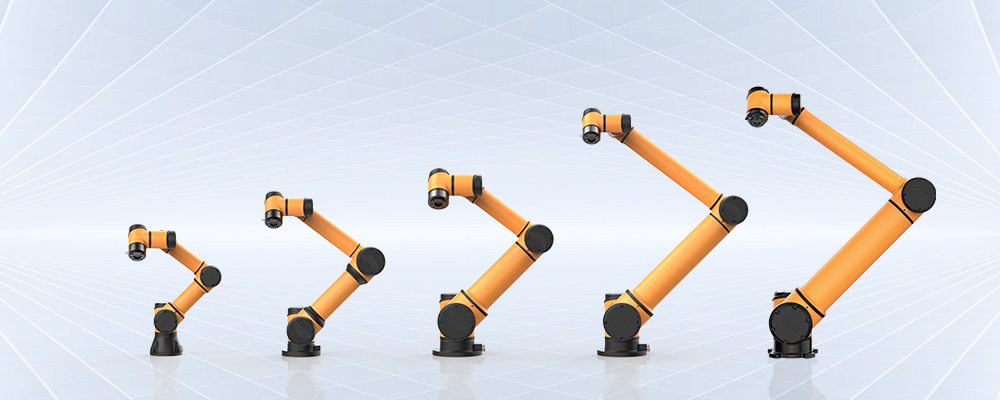
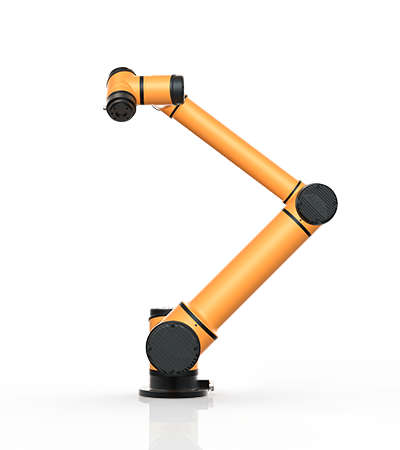
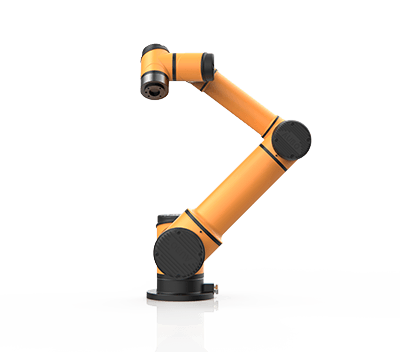
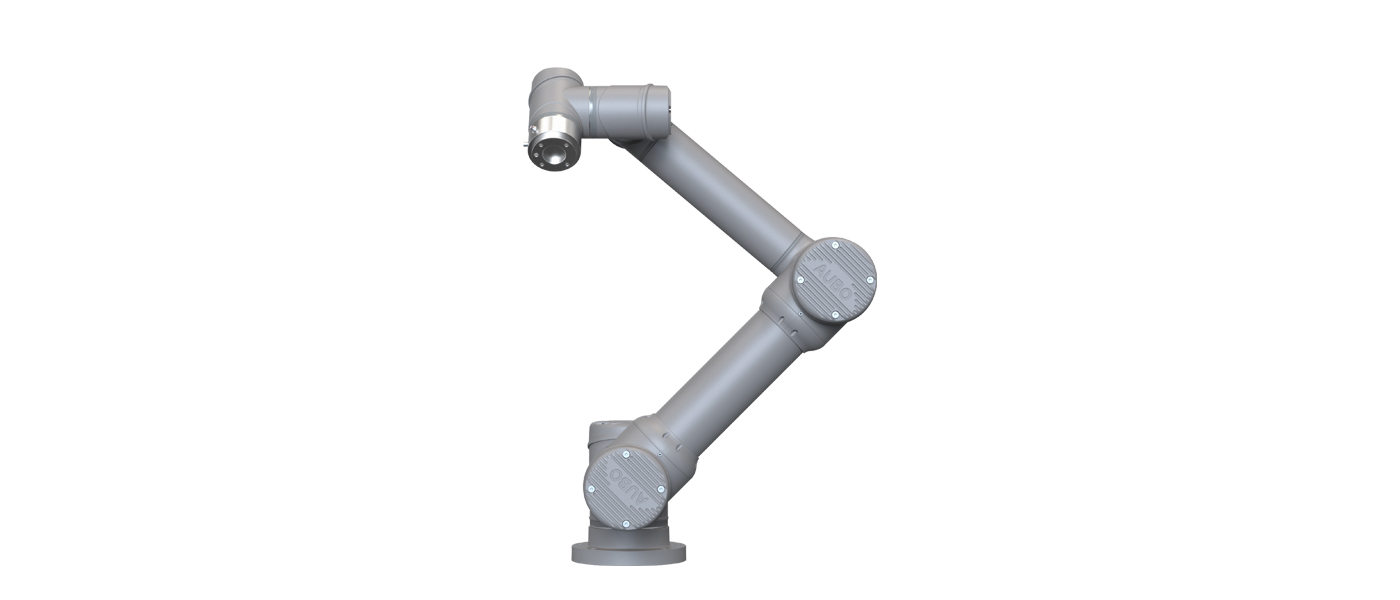
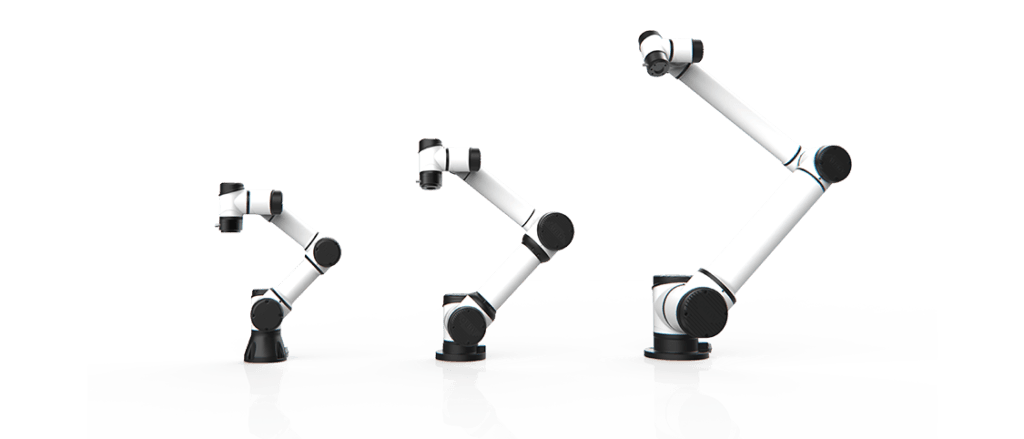
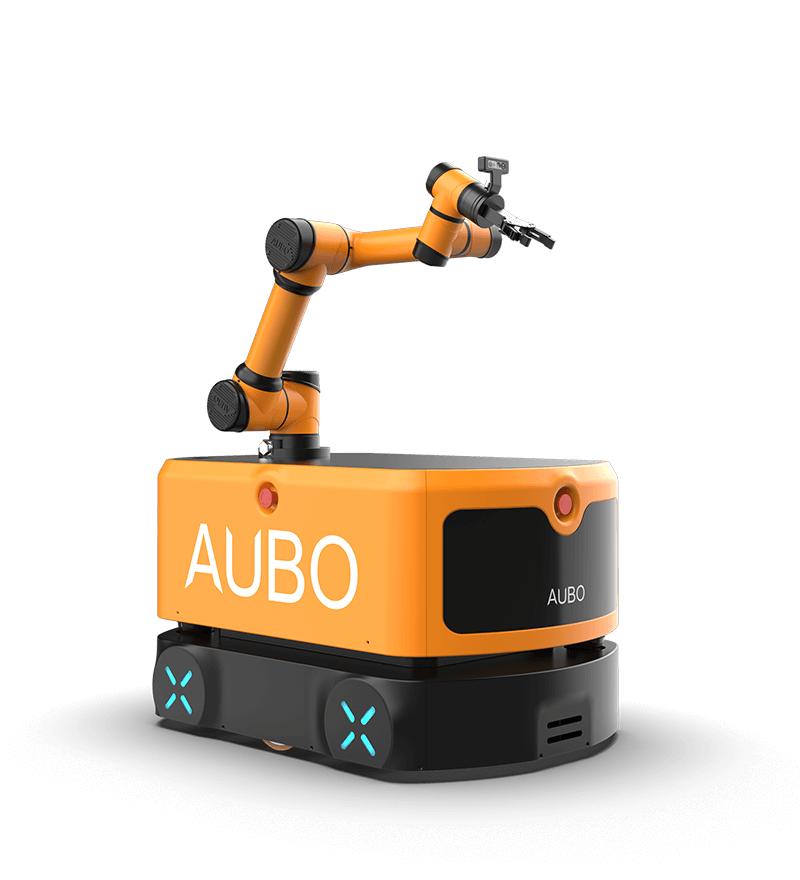
首頁aubo-robotics Aubo Robotics 遨博協作機器人 i系列協作機器人E系列協作機器人C系列協作機器人海納系列移動式協作機器人 遨博協作機器人產品優勢 部署靈活 輕便小巧,佔地面積小部署機械手臂來執行新任務平均只需要半天 柔性化生產 多種功能情境快速切換,可採用人機協作、雙機協作、多機協作等實現彈性生產 程式設計簡易 半小時可掌握編程方式,1小時可完成簡易編程拖曳示教、視覺化程式設計簡單高效,無需精通程式語言即可輕鬆操作機器人 應用廣泛 已在3C、汽車、五金家電、廚衛潔具、醫療健康、科研教育、餐飲、新零售、日化、物流等行業領域批量應用 安全穩定 產品經EN ISO 13849-1:2015(PL=d, CAT 3)、歐盟CE、北美NRTL、韓國KCs、中國CR 、SEMI S2、潔淨度class5級等認證支援10 級碰撞偵測和感測器安全偵測末端掉電不下墜,產品安全穩定提供16 個安全I/O 接口,發生單一故障時不會喪失安全功能 系統開放 多種語言環境對接、多種通訊協定、第三方插件深度集成通訊協定:TCP/IP、Modbus-RTU/TCP、Profinet介面與開放性:SDK(支援C/C++/C#/Lua/Python開發)、API支援Linux、Windows、ROS機器人作業系統 模組化 15分鐘內可快速拆裝更換維修保養更加快速與便利 節約成本 代替部分人工作業,節省人力成本不用改變原產線佈局,節省綜合改造及使用成本 高精度 毫秒級系統反應速度確保定位精度重複定位精度可達±0.02mm 遨博協作機器人產品應用 AUBO iS系列 AUBO iH系列 AUBO i系列 AUBO C系列 AUBO E系列 海納系列移動式協作機器人 模組化,易於更換採用驅控一體模組化設計,共有6種規格的標準模組,可快速更換,維修保養更便利 性能提升,高精高速相較於iH系列,重複定位精度、絕對精度、軌邊精度都有全面提升,機械手臂運轉速度更快 全新設計, 防護更強負載自重比最高可達1:3.2,核心零件最佳化,搭載新控制演算法;全封閉式結構,防護等級最高可達IP68 輕巧靈活,應用廣泛全新示教器重量僅1kg,全新控制櫃佔地減少50%;全系標配多功能工具端,應用範圍更廣 AUBO-iS7 工作負載:7 kg 設備重量:21.5 kg 工作半徑:886.5 mm 重複定位經度:± 0.02 mm AUBO-iS10 工作負載:10 kg 設備重量:36 kg 工作半徑:1300 mm 重複定位經度:± 0.03 mm AUBO-iS20 工作負載:20 kg 設備重量:64 kg 工作半徑:1647 mm 重複定位經度:± 0.05 mm 定位更準重複定位精度、上電定位精度進一步優化,最大碰撞力數值降低,毫秒系統響應速度確保定位精度,作業軌跡更平穩 速度更快工作速度提升10%-20%,6自由度機械手臂高效運轉,大幅提升工作效率 功能更強開放的系統平台,末端整合485通訊,增加末端拖曳示教功能,支援大電流供電,可與更多種類的末端執行器、視覺、移動等外圍設備直接建立通訊,更靈活、更便利 安全更優產品通過多項專業認證,穩定可靠。碰撞偵測靈敏度提高,無需安全防護,人機協作更安全 AUBO-i3H 工作負載:3 kg 設備重量:16 kg 工作半徑:625 mm 重複定位經度:± 0.02 mm AUBO-i5H 工作負載:5 kg 設備重量:24 kg 工作半徑:886.5 mm 重複定位經度:± 0.02 mm AUBO-i7H 工作負載:7 kg 設備重量:24 kg 工作半徑:786.5 mm 重複定位經度:± 0.02 mm AUBO-i10H 工作負載:10 kg 設備重量:38.5 kg 工作半徑:1350 mm 重複定位經度:± 0.03 mm AUBO-i12H 工作負載:3 kg 設備重量:16 kg 工作半徑:1250 mm 重複定位經度:± 0.03 mm AUBO-i16H 工作負載:3 kg 設備重量:16 kg 工作半徑:967.5 mm 重複定位經度:± 0.03 mm 更安全產品經EN ISO 13849-1:2015(PL=d, CAT 3)、歐盟CE、北美NRTL、韓國KCs、中國CR 、SEMI S2、潔淨度class5級等認證,核心零件全國產化,支援10 級碰撞檢測和感測器安全檢測,無需安全防護 更開放開放的系統平台,支援SDK、API,多種通訊方式,可與多種末端治具、視覺、行動等外圍設備建立通訊 更精準重複定位精度可達±0.02mm,長時間連續完成高精度要求的工作,大幅提升生產良率 更簡單可選擇拖曳示教、座標定位、路徑規劃、離線編程等多種方式操作機器人,視覺化介面簡單易學 更廣泛全系列產品提供3-20KG不同負載能力,可涵蓋各產業差異性應用,應用範圍廣泛 AUBO-i3 工作負載:3 kg 設備重量:16 kg 工作半徑:625 mm 重複定位經度:± 0.02 mm AUBO-i5 工作負載:5 kg 設備重量:24 kg 工作半徑:886.5 mm 重複定位經度:± 0.02 mm AUBO-i7 工作負載:7 kg 設備重量:24 kg 工作半徑:786.5 mm 重複定位經度:± 0.02 mm AUBO-i10 工作負載:10 kg 設備重量:38.5 kg 工作半徑:1350 mm 重複定位經度:± 0.03 mm AUBO-i12 工作負載:12 kg 設備重量:40 kg 工作半徑:1250 mm 重複定位經度:± 0.03 mm AUBO-i16 工作負載:16 kg 設備重量:38 kg 工作半徑:967.5 mm 重複定位經度:± 0.03 mm AUBO-i20 工作負載:20 kg 設備重量:63 kg 工作半徑:1650 mm 重複定位經度:± 0.1 mm 高回報率低成本投入,高投資報酬率,平均3-9個月回收投資成本 快速部署佔地面積小、快速部署,可適應狹小空間安裝 簡易介面超簡易的工作流程圖形介面,豐富友善的腳本編程,可快速熟練操作 模組設計一體化關節模組設計、便利拆裝,維護效率更高 低成本運作對週邊環境改動小,可實現高效低成本運作 高拓展性標準化的智慧接口,開放性的程式語言,極高的可擴充性,自主搭配不同配件,實現豐富多樣的功能 AUBO-C5 工作負載:5 kg 設備重量:24 kg 工作半徑:886.5 mm 重複定位經度:± 0.1 mm 教材系統、課程豐富國家出版社出品《工業機器人技術及應用》、《工業機器人操作與程式設計》、《工業機器人基礎與應用》、《機器人Python編程與開發》、《機器視覺技術及應用》系列協作機器人技術教材。 標準支撐、雙訓融合實踐案例300+,課程實踐與技能訓練課證融通,標準化、高端的技能人才培養體系,符合教育部「智慧協作機器人技術及應用」職業技能等級標準,涵蓋初、中、高不同人才培養級別標準。 工業性能、開源開放工業級的硬體性能與豐富的產業應用,使其學有所用。開源開放的軟體程式碼與接口,提供ROS開源實訓案例與多種SDK開發接口,使之創新無限。 AUBO-E3 工作負載:3 kg 設備重量:16 kg 工作半徑:625 mm 重複定位經度:± 0.02 mm AUBO-E5 工作負載:5 kg 設備重量:24 kg 工作半徑:886.5 mm 重複定位經度:± 0.02 mm AUBO-E10 工作負載:10 kg 設備重量:38.5 kg 工作半徑:1350 mm 重複定位經度:± 0.1 mm 多位一體多合一控制系統可靈活控制協作機器人、行動底盤、視覺等設備,省卻繁雜操作,實現一鍵協同體驗 訊息直達即時取得各設備狀態,資訊一步直達、無縫流轉。機械手臂示教器可即時讀取移動底盤位置、速度、電量、I/O顯示及控制、雷射阻擋狀態、導航狀態、警報日誌等 擴展靈活可靈活搭配不同負載的協作機器人、移動底盤、2D/3D視覺、末端工具等,實現跨裝置間的高效協同擴展,滿足不同產業的負載及場景需求 簡單易用協作機器人、行動底盤、視覺系統的程式整合到同一個程式軟體上使用,流程圖編程,具有允許使用者編輯的任務模組軟體,使用者可根據自身需求設計機器人的行為,採用視覺引導機械手臂實現高精度定位,與傳統程式設計方式相容,降低系統使用難度 安全調度採用高精度SLAM雷射雷達進行導航與定位,雙輪差速運動控制,移動更加平穩 雷射資料安全輔助,人員靠近移動底盤時,機械手臂降速運行,確保安全 協同作業透過遨博多合一控制系統,可實現協同控制協作機器人、行動底盤、視覺等設備,支援單機操作與多層調度方案 AUBO-AMR300 外形尺寸:1000*700*600 mm(不含機械手臂高度) 負載表面尺寸:650*620 mm 設備重量:250 kg (不含機械手臂) 工作半徑:886.5 mm 最大載重:300Kg(包含機械手臂和載具重量) 驅動方式:雙輪差速驅動